基于React Three Fiber实现SLAM手动闭环检测
详细介绍如何使用React Three Fiber构建交互式SLAM手动闭环检测系统,通过可视化点云配准实现精确的回环检测与建图优化
在 SLAM(Simultaneous Localization and Mapping,同时定位与建图)系统中,闭环检测是确保建图精度和一致性的关键技术。传统的自动闭环检测方法虽然高效,但在复杂环境或特征稀疏场景下往往表现不佳。本文将详细介绍如何基于 React Three Fiber 构建一个交互式的手动闭环检测系统,通过可视化点云配准来实现精确的回环参数优化。
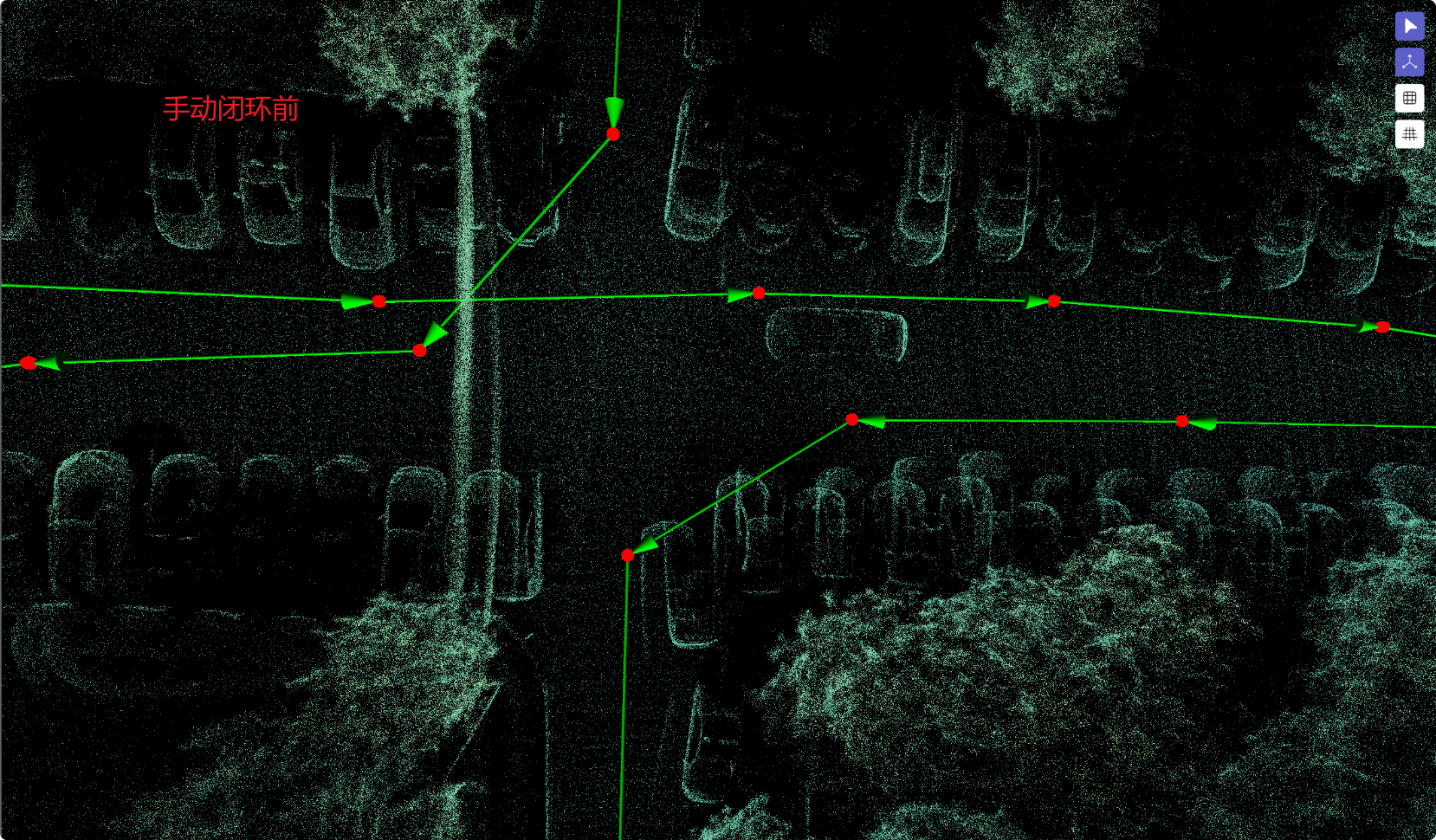
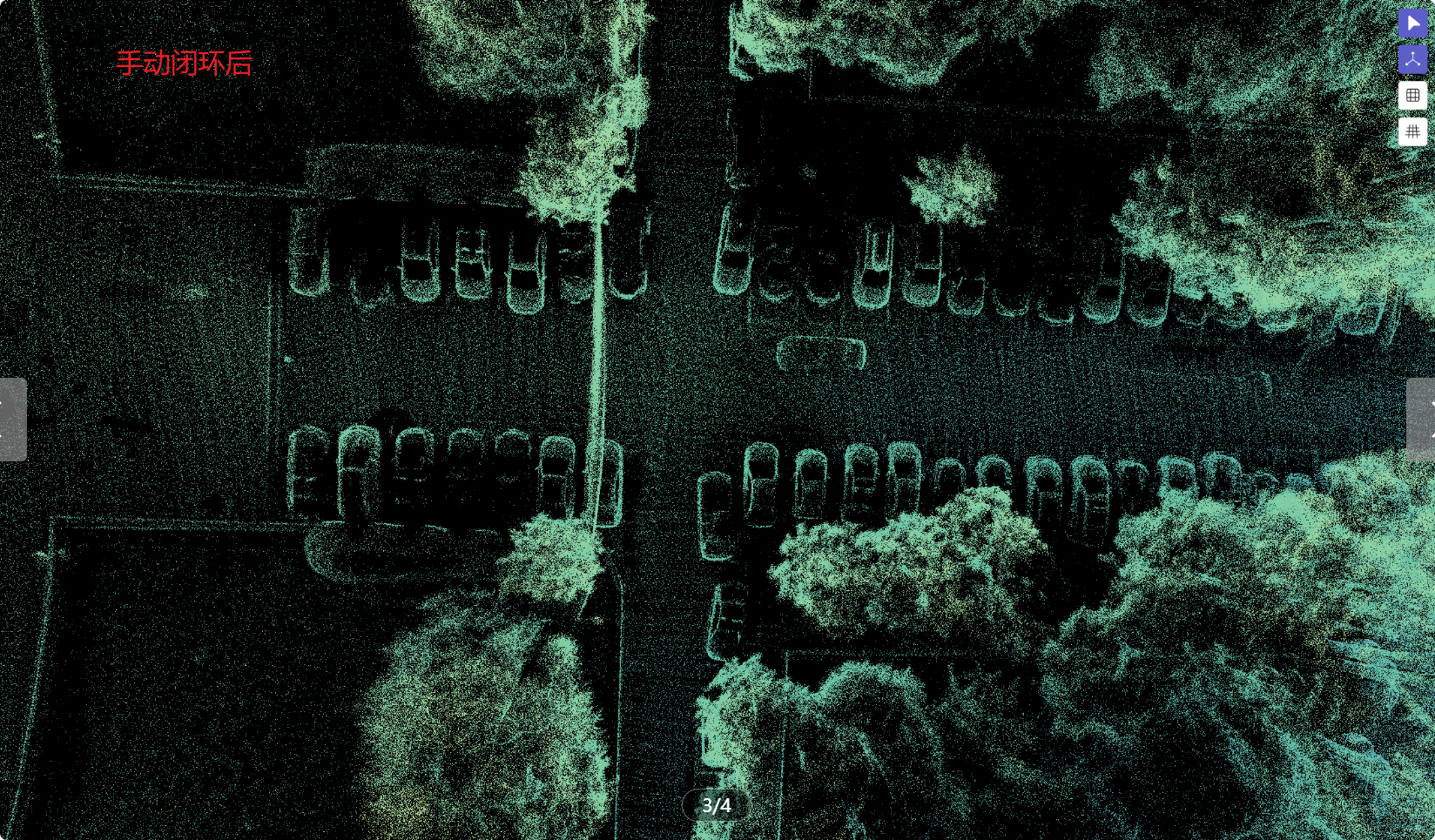 武汉大学信息学部室外停车场,俯视图
武汉大学信息学部室外停车场,俯视图
闭环检测在 SLAM 中的重要性
累积误差问题
SLAM 系统在长期运行过程中,由于传感器噪声和运动估计误差的累积,会导致建图结果出现明显的漂移和不一致性。这种现象在大规模环境建图中尤为明显:
// 累积误差示例:里程计漂移模拟
const odometryDrift = {
position: { x: 0, y: 0, z: 0 },
orientation: { x: 0, y: 0, z: 0, w: 1 },
// 每帧累积的误差
accumulateError(deltaTime) {
const noiseScale = 0.001;
this.position.x += Math.random() * noiseScale * deltaTime;
this.position.y += Math.random() * noiseScale * deltaTime;
this.position.z += Math.random() * noiseScale * deltaTime;
},
};
闭环检测的解决方案
闭环检测通过识别机器人重新访问之前到过的位置,建立约束关系来纠正累积误差。手动闭环检测的优势在于:
- 高精度配准:人工干预可以实现更精确的点云配准
- 复杂场景适应:在自动算法失效的场景下仍能工作
- 参数可控:可以精确控制闭环约束的权重和置信度
- 质量保证:通过可视化验证确保闭环质量
React Three Fiber 技术栈选择
为什么选择 R3F?
React Three Fiber (R3F) 是 Three.js 的 React 渲染器,为构建 3D 应用提供了声明式的开发范式:
// 传统Three.js写法
const geometry = new THREE.BoxGeometry(1, 1, 1);
const material = new THREE.MeshBasicMaterial({ color: 0x00ff00 });
const cube = new THREE.Mesh(geometry, material);
scene.add(cube);
// R3F声明式写法
<mesh>
<boxGeometry args={[1, 1, 1]} />
<meshBasicMaterial color="green" />
</mesh>;
核心依赖配置
{
"dependencies": {
"@react-three/fiber": "^8.15.12",
"@react-three/drei": "^9.88.17",
"three": "^0.158.0",
"react": "^18.2.0",
"@types/three": "^0.158.3"
}
}
系统架构设计
整体架构图
graph TB
A[点云数据输入] --> B[数据预处理]
B --> C[React Three Fiber渲染器]
C --> D[双帧点云显示]
D --> E[PivotControls交互]
E --> F[变换矩阵计算]
F --> G[闭环参数输出]
G --> H[SLAM后端优化]
核心组件结构
// 系统主组件结构
const SLAMLoopClosureSystem = () => {
return (
<div className="w-full h-screen">
<Canvas camera={{ position: [5, 5, 5] }}>
{/* 场景基础设置 */}
<SceneSetup />
{/* 双点云渲染 */}
<PointCloudRenderer
referenceFrame={referencePointCloud}
currentFrame={currentPointCloud}
/>
{/* 交互控制 */}
<InteractionControls />
{/* 用户界面覆层 */}
<Html>
<LoopClosurePanel />
</Html>
</Canvas>
</div>
);
};
点云数据结构与加载
点云数据格式定义
interface PointCloudFrame {
id: string;
timestamp: number;
points: Float32Array; // [x, y, z, x, y, z, ...]
colors?: Float32Array; // [r, g, b, r, g, b, ...]
normals?: Float32Array; // [nx, ny, nz, ...]
intensity?: Float32Array; // 强度信息
pose: {
position: [number, number, number];
rotation: [number, number, number, number]; // quaternion
};
}
interface LoopClosureCandidate {
referenceFrameId: string;
currentFrameId: string;
initialTransform?: Matrix4;
confidence: number;
}
点云加载与预处理
const usePointCloudLoader = (frameData) => {
const [pointCloud, setPointCloud] = useState(null);
useEffect(() => {
const loadPointCloud = async () => {
// 点云数据预处理
const processedPoints = preprocessPointCloud(frameData.points);
// 创建Three.js几何体
const geometry = new BufferGeometry();
geometry.setAttribute(
"position",
new BufferAttribute(processedPoints, 3)
);
if (frameData.colors) {
geometry.setAttribute(
"color",
new BufferAttribute(frameData.colors, 3)
);
}
setPointCloud({
geometry,
material: new PointsMaterial({
size: 0.02,
vertexColors: true,
transparent: true,
opacity: 0.8,
}),
});
};
loadPointCloud();
}, [frameData]);
return pointCloud;
};
// 点云预处理函数
const preprocessPointCloud = (rawPoints) => {
// 下采样减少渲染负担
const downsampledPoints = voxelDownsample(rawPoints, 0.05);
// 离群点移除
const cleanPoints = removeOutliers(downsampledPoints);
// 法向量估计(可选)
const pointsWithNormals = estimateNormals(cleanPoints);
return pointsWithNormals;
};
双点云渲染实现
参考帧与当前帧显示
const DualPointCloudRenderer = ({
referenceFrame,
currentFrame,
showReference = true,
showCurrent = true,
}) => {
const referenceCloud = usePointCloudLoader(referenceFrame);
const currentCloud = usePointCloudLoader(currentFrame);
return (
<group>
{/* 参考帧点云 - 固定显示,蓝色 */}
{showReference && referenceCloud && (
<points
geometry={referenceCloud.geometry}
material={
new PointsMaterial({
color: 0x0066ff,
size: 0.02,
transparent: true,
opacity: 0.6,
})
}
/>
)}
{/* 当前帧点云 - 可交互,红色 */}
{showCurrent && currentCloud && (
<PivotControls
anchor={[0, 0, 0]}
depthTest={false}
lineWidth={3}
scale={0.8}
onDrag={(local, deltaL, world, deltaW) => {
// 实时更新变换矩阵
updateTransformMatrix(world);
}}
>
<points
geometry={currentCloud.geometry}
material={
new PointsMaterial({
color: 0xff0066,
size: 0.02,
transparent: true,
opacity: 0.8,
})
}
/>
</PivotControls>
)}
</group>
);
};
颜色编码方案
为了更好地区分两帧点云并观察配准效果,我们采用以下颜色编码策略:
const ColorSchemes = {
reference: {
base: 0x4a90e2, // 蓝色系
highlight: 0x7bb3f0, // 高亮蓝
opacity: 0.6,
},
current: {
base: 0xe24a4a, // 红色系
highlight: 0xf07b7b, // 高亮红
opacity: 0.8,
},
overlap: {
base: 0x50e3c2, // 青绿色,表示重叠区域
opacity: 0.9,
},
};
// 动态颜色计算
const calculateOverlapColor = (
referencePoints,
currentPoints,
threshold = 0.1
) => {
const colors = new Float32Array(currentPoints.length);
for (let i = 0; i < currentPoints.length / 3; i++) {
const point = new Vector3(
currentPoints[i * 3],
currentPoints[i * 3 + 1],
currentPoints[i * 3 + 2]
);
// 查找最近邻点
const distance = findNearestDistance(point, referencePoints);
if (distance < threshold) {
// 重叠区域 - 青绿色
colors[i * 3] = 0.31; // R
colors[i * 3 + 1] = 0.89; // G
colors[i * 3 + 2] = 0.76; // B
} else {
// 非重叠区域 - 保持原色
colors[i * 3] = 0.89; // R
colors[i * 3 + 1] = 0.29; // G
colors[i * 3 + 2] = 0.4; // B
}
}
return colors;
};
PivotControls 交互实现
基础控制设置
const InteractivePivotControls = ({
children,
onTransformChange,
initialTransform = new Matrix4(),
}) => {
const [currentTransform, setCurrentTransform] = useState(initialTransform);
return (
<PivotControls
// 控制器外观设置
anchor={[0, 0, 0]}
depthTest={false}
lineWidth={2}
axisColors={["#ff0000", "#00ff00", "#0000ff"]}
scale={100}
// 控制模式
disableRotations={false}
disableScaling={true} // 禁用缩放,保持点云真实尺寸
// 交互回调
onDrag={(local, deltaL, world, deltaW) => {
handleTransformUpdate(world, deltaW);
}}
onDragStart={() => {
// 开始拖拽时的处理
console.log("开始变换操作");
}}
onDragEnd={() => {
// 结束拖拽时保存当前状态
saveTransformState(currentTransform);
}}
>
{children}
</PivotControls>
);
};
变换矩阵处理
const TransformManager = () => {
const [transformMatrix, setTransformMatrix] = useState(new Matrix4());
const [transformHistory, setTransformHistory] = useState([]);
// 处理变换更新
const handleTransformUpdate = useCallback((worldMatrix, delta) => {
// 更新当前变换矩阵
setTransformMatrix(worldMatrix.clone());
// 分解变换矩阵获取位置、旋转、缩放
const position = new Vector3();
const rotation = new Quaternion();
const scale = new Vector3();
worldMatrix.decompose(position, rotation, scale);
// 转换为欧拉角(便于显示)
const euler = new Euler().setFromQuaternion(rotation, "XYZ");
// 更新UI显示
updateTransformUI({
position: position.toArray(),
rotation: [
THREE.MathUtils.radToDeg(euler.x),
THREE.MathUtils.radToDeg(euler.y),
THREE.MathUtils.radToDeg(euler.z),
],
});
// 实时计算配准质量指标
const alignmentScore = calculateAlignmentScore(worldMatrix);
updateAlignmentScore(alignmentScore);
}, []);
// 重置变换
const resetTransform = () => {
setTransformMatrix(new Matrix4());
};
// 撤销操作
const undoTransform = () => {
if (transformHistory.length > 0) {
const previousTransform = transformHistory.pop();
setTransformMatrix(previousTransform);
setTransformHistory([...transformHistory]);
}
};
return {
transformMatrix,
handleTransformUpdate,
resetTransform,
undoTransform,
};
};
闭环参数存储与管理
const LoopClosureManager = () => {
const [loopClosures, setLoopClosures] = useState([]);
const [currentSession, setCurrentSession] = useState(null);
// 保存新的闭环参数
const saveLoopClosure = useCallback(
(params) => {
const newLoopClosure = {
id: generateUUID(),
timestamp: Date.now(),
...params,
isVerified: true,
weight: calculateWeight(params.alignmentScore),
};
setLoopClosures((prev) => [...prev, newLoopClosure]);
// 自动保存到本地存储
localStorage.setItem(
"loopClosures",
JSON.stringify([...loopClosures, newLoopClosure])
);
// 可选:发送到后端
sendToBackend(newLoopClosure);
},
[loopClosures]
);
// 删除闭环参数
const deleteLoopClosure = useCallback((id) => {
setLoopClosures((prev) => prev.filter((lc) => lc.id !== id));
}, []);
// 批量导出
const exportLoopClosures = useCallback(() => {
const exportData = {
version: "1.0",
timestamp: new Date().toISOString(),
loopClosures: loopClosures,
summary: {
totalCount: loopClosures.length,
averageConfidence:
loopClosures.reduce(
(sum, lc) => sum + lc.alignmentScore.confidence,
0
) / loopClosures.length,
},
};
const blob = new Blob([JSON.stringify(exportData, null, 2)], {
type: "application/json",
});
const url = URL.createObjectURL(blob);
const a = document.createElement("a");
a.href = url;
a.download = `loop_closures_${Date.now()}.json`;
a.click();
URL.revokeObjectURL(url);
}, [loopClosures]);
return {
loopClosures,
saveLoopClosure,
deleteLoopClosure,
exportLoopClosures,
};
};
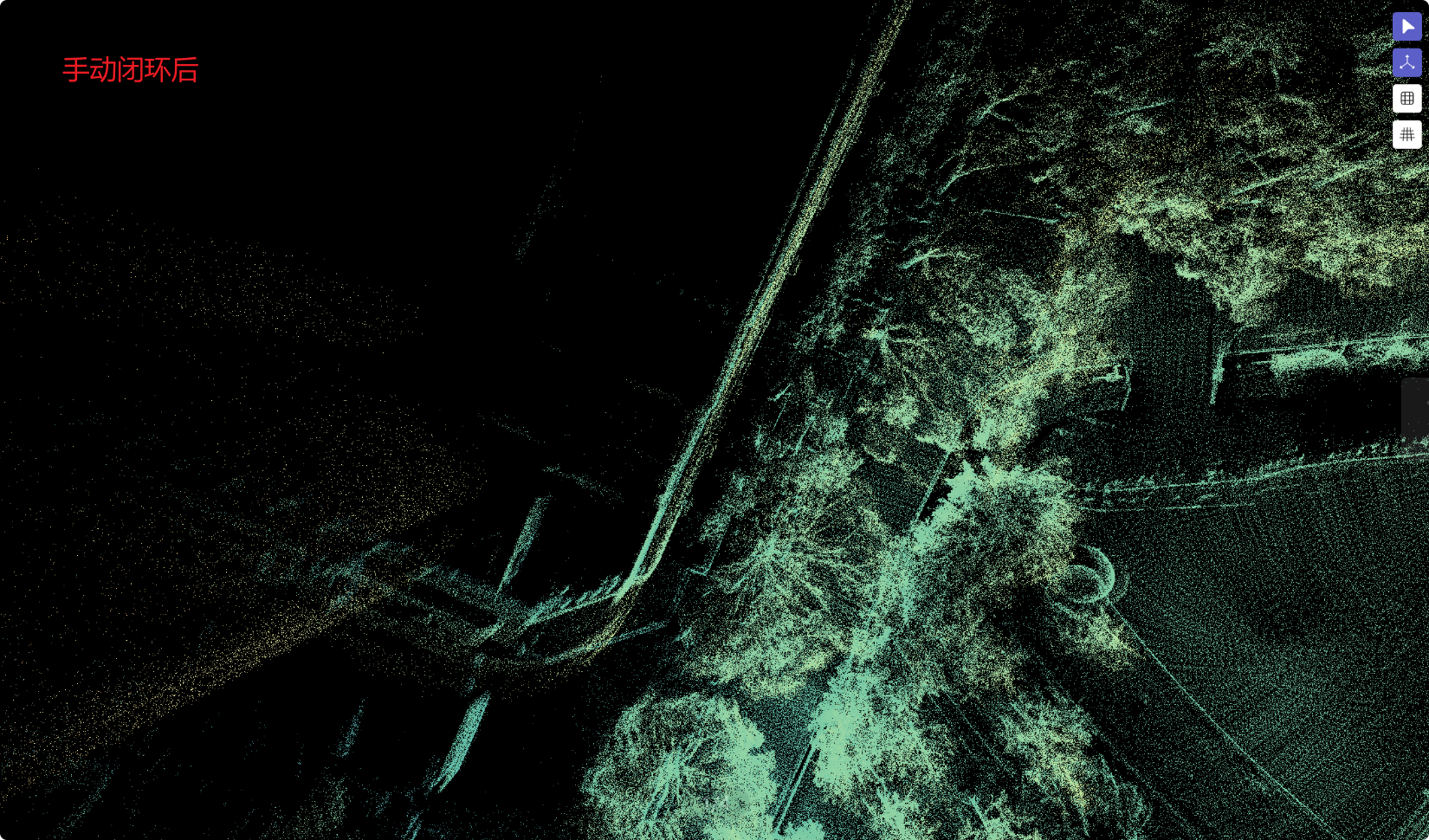
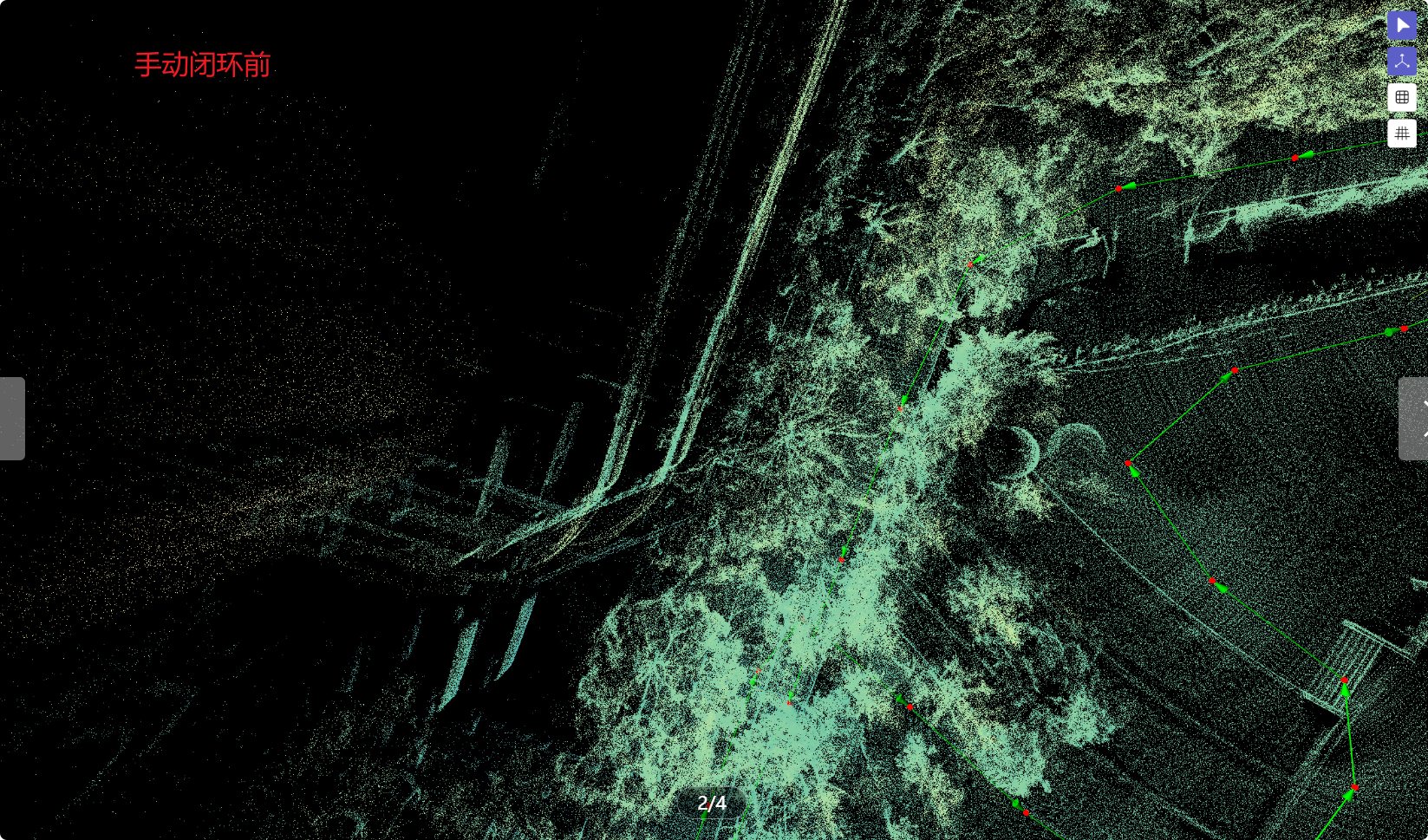 武汉大学信息学部实验大楼,俯视图
武汉大学信息学部实验大楼,俯视图
总结
本文详细介绍了基于 React Three Fiber 实现 SLAM 手动闭环检测系统的完整方案。通过将传统的 SLAM 技术与现代 Web3D 技术相结合,我们构建了一个直观、高效的交互式闭环检测工具。
系统优势
- 可视化直观:通过 3D 渲染直接观察点云配准效果
- 交互友好:利用 PivotControls 提供自然的变换操作体验
- 质量可控:实时计算配准质量指标,确保闭环可靠性
- 性能优化:通过多种策略保证大规模点云的流畅渲染
- 集成便利:标准化的数据接口便于与现有 SLAM 系统集成