多传感器SLAM之全景图像与点云可视化
详细介绍在Potree中实现全景图像与点云融合显示的核心思路和技术实现,重点阐述外参标定的重要性以及累积误差对可视化效果的影响

 武汉大学信息学部
武汉大学信息学部
可视化需求与挑战
在多传感器SLAM系统中,激光雷达提供精确的几何结构信息,全景相机捕获丰富的颜色纹理数据。在Potree中同时显示这两种数据,能够为用户提供既有几何精度又富含视觉细节的综合体验。
然而,要实现高质量的融合可视化,必须解决传感器标定误差和SLAM累积误差带来的图像与点云偏移问题。本文将重点介绍在Potree中实现全景图像显示的核心思路和基本技术实现。
Potree中全景图像显示实现
坐标系统一的关键问题
世界坐标系建立: 在多传感器SLAM系统中,必须建立统一的世界坐标系作为参考基准。通常采用右手坐标系,定义X轴为东向,Y轴为天向,Z轴为北向,单位统一使用米制。
外参标定的重要性: 外参标定是影响可视化质量的关键因素。每个传感器的外参矩阵定义了其本地坐标系到世界坐标系的变换关系,包含6个自由度(3个旋转 + 3个平移)。外参标定的精度直接决定了全景图像与点云的对齐效果。
累积误差的影响: SLAM系统运行过程中会产生累积误差,主要来源包括:
- 里程计漂移导致的轨迹偏差
- 闭环检测失效引起的地图不一致
- 动态物体干扰造成的定位错误
- 传感器噪声的长期积累
这些误差会导致全景图像与点云之间出现空间偏移,影响融合可视化的效果。
全景图像渲染的基本思路
球面映射策略: 全景图像通常采用等距圆柱投影格式存储,需要映射到三维球面上进行显示。在Potree中的实现思路是:
- 创建大半径球体几何(如500米)
- 设置球体内表面渲染,相机位于球心
- 将全景图像作为纹理贴图到球面
- 根据SLAM轨迹实时更新球体位置
时空同步机制: 全景图像的显示需要与SLAM轨迹严格同步:
- 根据时间戳插值计算准确的传感器位姿
- 考虑相机与激光雷达的外参关系
- 补偿系统延迟和时钟同步误差
// 全景球位置更新的核心逻辑
function updatePanoramaSphere(slamPose, cameraExtrinsics) {
// 应用外参变换,从SLAM坐标系转换到相机坐标系
const cameraPosition = slamPose.clone().multiply(cameraExtrinsics)
// 更新全景球位置
panoramaSphere.position.copy(cameraPosition.position)
// 检查累积误差,必要时进行校正
if (accumulatedError > threshold) {
applyErrorCorrection(cameraPosition)
}
}
纹理映射与时空同步
等距圆柱投影处理: 全景图像通常采用等距圆柱投影格式存储,在Three.js中映射到球面需要正确配置纹理参数:
// 全景纹理配置
texture.mapping = THREE.EquirectangularReflectionMapping
texture.wrapS = THREE.RepeatWrapping
texture.wrapT = THREE.ClampToEdgeWrapping
texture.flipY = false
时空同步的核心挑战: 实现全景图像与点云的精确同步需要解决以下问题:
- 时间戳对齐:SLAM轨迹和全景图像的时间戳必须精确对应
- 插值计算:对于非采样时刻,需要通过插值获得准确位姿
- 延迟补偿:考虑系统处理延迟和传感器采集延迟
- 外参应用:正确应用相机与激光雷达之间的外参变换
误差检测与校正方法
外参标定误差的识别
视觉检查方法:
- 观察建筑物边缘是否与点云轮廓对齐
- 检查地面高程信息的一致性
- 比较重复访问区域的对齐质量
- 注意远近景物的比例关系
定量评估指标:
- 特征点重投影误差
- 几何结构对齐RMSE
- 边缘检测匹配度
- 纹理-几何一致性评分
SLAM累积误差的影响
误差表现形式:
- 长轨迹后段的图像-点云偏移逐渐增大
- 闭环区域出现明显的空间不一致
- 重复访问点的全景图像位置偏差
- 全局地图的视觉协调性下降
校正策略:
- 利用闭环检测结果进行位姿图优化
- 引入GPS等全局定位信息约束
- 采用滑动窗口局部优化方法
- 实时监控误差并及时预警
// 误差检测与校正的基本框架
function detectAndCorrectError(slamPose, panoramaImage, pointCloud) {
// 计算配准误差
const alignmentError = calculateAlignment(panoramaImage, pointCloud)
// 判断是否需要校正
if (alignmentError > errorThreshold) {
// 应用误差校正
const correctedPose = applyErrorCorrection(slamPose, alignmentError)
return correctedPose
}
return slamPose
}

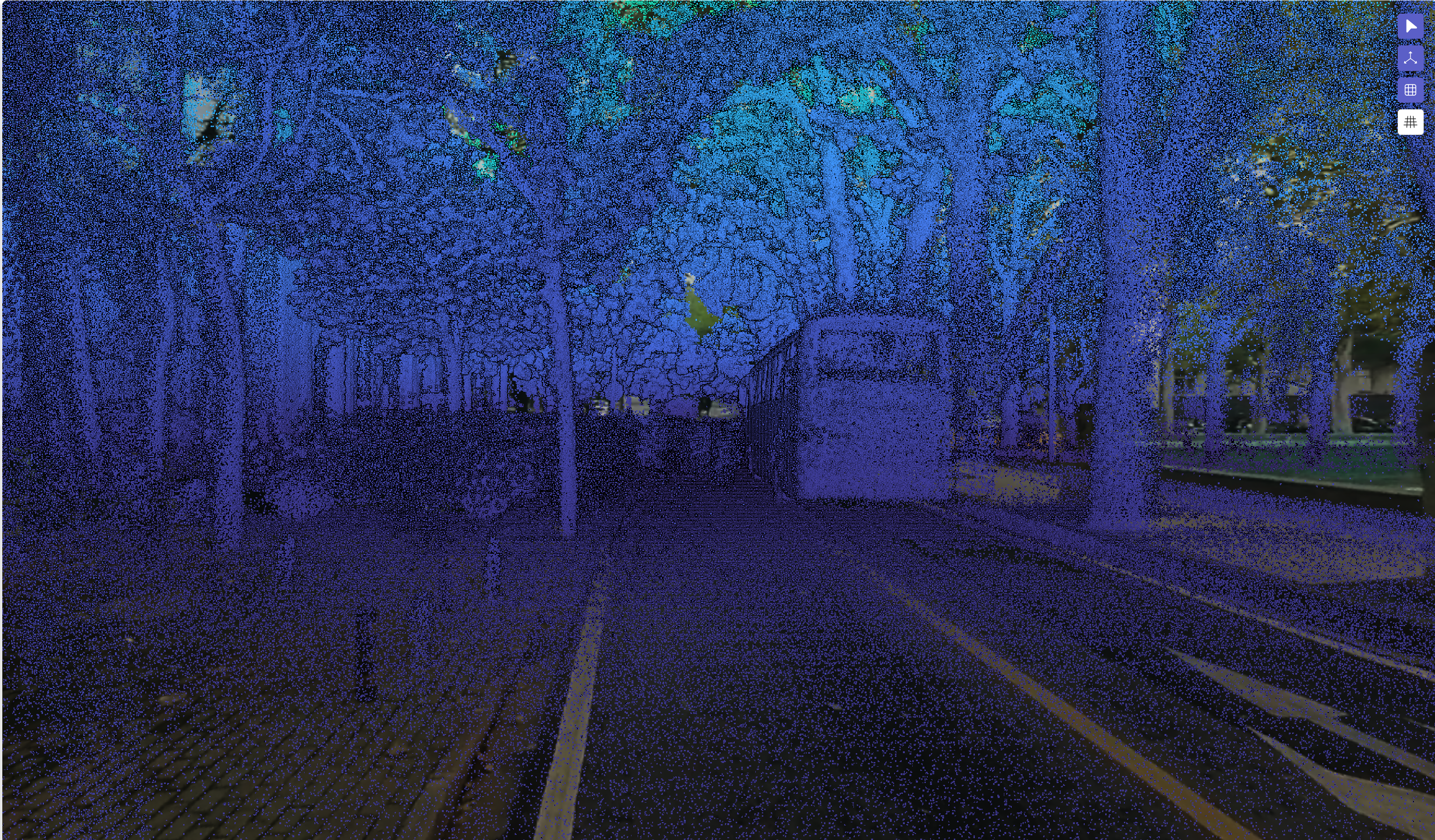
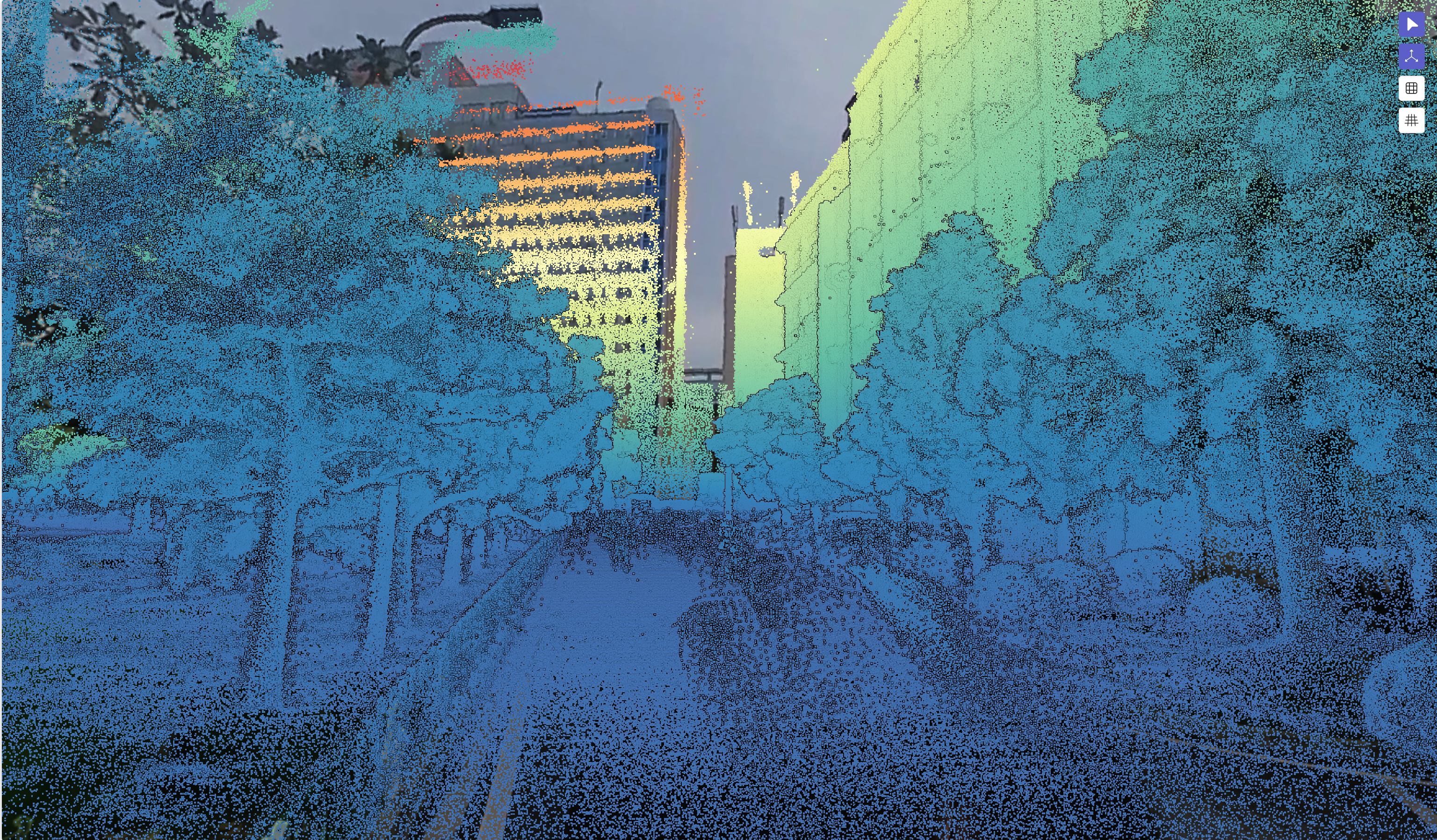 外参标定误差和SLAM累积误差对可视化效果的影响
外参标定误差和SLAM累积误差对可视化效果的影响
总结与展望
本文详细介绍了在Potree中实现多传感器融合建图的全景图像渲染技术。通过坐标系统一、第一视角同步、纹理缓存优化等关键技术,我们成功实现了点云与全景图像的高质量融合可视化。
核心技术贡献:
- 扩展Potree架构:无缝集成全景图像渲染能力
- 时空数据同步:精确的轨迹插值与相机控制
- 性能优化策略:多级缓存与自适应质量控制
- 误差检测机制:实时配准质量监控
实际应用价值:
- 提供沉浸式的SLAM建图结果浏览体验
- 支持大规模城市环境的高效可视化
- 为SLAM系统调试提供直观的诊断工具
- 促进多传感器融合技术的工程化应用
随着WebXR技术的发展,未来的Potree融合可视化系统将支持虚拟现实和增强现实设备,为用户提供更加沉浸式的体验。同时,基于机器学习的智能化误差检测和自动校正技术也将进一步提升系统的鲁棒性和易用性。
本文基于实际的城市建图项目开发经验,相关代码已在多个SLAM可视化项目中得到验证和优化。