Potree开发笔记-5:增量渲染与实时流处理
探索基于Potree的增量渲染系统设计,实现大规模点云数据的实时获取、处理与可视化的完整解决方案
增量渲染系统概述
在实际的点云应用场景中,我们经常面临大量实时数据流的处理需求,如激光雷达扫描、无人机测绘、移动测量车等设备持续产生的点云数据。传统的批处理方式无法满足实时性要求,而直接渲染原始数据又会遇到性能瓶颈。
本文提出一种基于Potree的增量渲染方案,通过Three.js临时渲染和Potree正式渲染的混合策略,实现大规模点云数据的实时可视化。
系统架构设计思路
双重渲染策略
传统方案的问题在于要么牺牲实时性(等待数据完整后处理),要么牺牲性能(直接渲染海量原始数据)。我们的解决方案是采用双重渲染策略:
- 即时反馈层:使用Three.js快速渲染新到达的数据,确保用户能立即看到更新
- 优化显示层:后台将数据转换为Potree格式,提供高性能的最终渲染效果
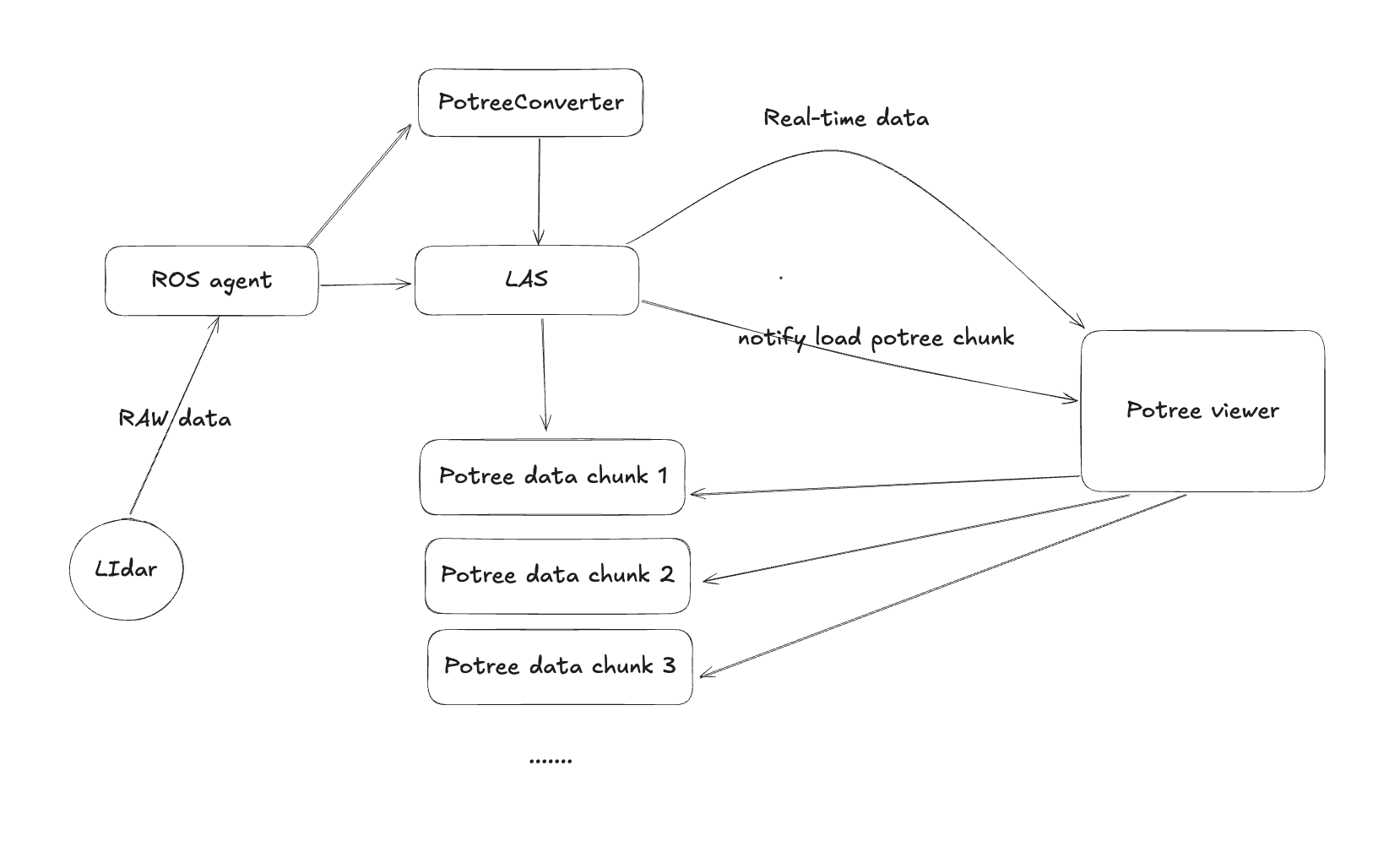
数据流转机制
核心思路是建立一个时间窗口缓冲机制:
- 新数据立即在Three.js中临时显示
- 同时写入LAS格式文件进行累积
- 当累积到足够量级或超时时,触发PotreeConverter转换
- 转换完成后,移除临时渲染,加载优化后的Potree数据
内存管理策略
为避免内存泄漏,系统采用分块轮转管理:
- 将点云数据按空间或时间分块
- 维护活跃块列表,超出范围的块自动释放
- 临时渲染对象与Potree对象的生命周期分离管理
核心技术要点
1. 点云数据缓存与聚合
建立智能缓存机制来平衡实时性与效率:
时间触发:每30秒自动处理一次累积数据
容量触发:当缓存达到10万点时立即处理
空间触发:按照地理区域分块,每个区域独立处理
2. LAS文件实时生成
LAS格式作为点云数据的工业标准,需要支持动态写入:
文件头管理:预留足够空间,支持点数量的动态更新
数据块写入:采用追加写入模式,避免重写整个文件
索引维护:实时更新空间索引,确保数据完整性
3. PotreeConverter集成桥接
建立与PotreeConverter的无缝集成:
异步转换:在独立进程中运行converter,避免阻塞主渲染
进度监控:实时监控转换进度,提供用户反馈
结果验证:转换完成后验证数据完整性和格式正确性
4. Three.js临时渲染优化
临时渲染需要在性能和效果间找到平衡:
几何体复用:使用BufferGeometry批量渲染,减少draw call
LOD控制:根据相机距离动态调整点密度
色彩映射:提供基础的高程或强度着色
5. 渲染切换机制
临时渲染与Potree渲染的平滑切换:
淡出动画:临时对象逐渐透明消失
位置对齐:确保新旧数据在空间上精确对应
状态同步:相机位置、渲染参数等状态保持一致
性能优化策略
数据处理优化
分层处理:根据数据重要性分级处理,核心区域优先
增量更新:只处理变化的部分,避免重复计算
并行处理:充分利用Web Worker进行数据预处理
渲染性能优化
视锥裁剪:只渲染可见范围内的数据
时间片调度:将处理任务分散到多个帧中执行
内存池管理:复用几何体和材质对象,减少GC压力
网络传输优化
数据压缩:使用gzip或专用算法压缩点云数据
断点续传:支持大文件的分块传输和断点恢复
缓存策略:在客户端建立智能缓存机制
实际应用场景
1. 激光雷达实时扫描
移动激光雷达车在城市道路扫描时,需要实时显示扫描结果:
- 扫描数据通过4G/5G实时传输
- 操作员可以立即看到扫描效果并调整参数
- 后台自动生成高质量的Potree数据用于后期分析
2. 无人机航测项目
大面积航测项目中的进度监控:
- 无人机完成一个区域后立即上传数据
- 项目管理者可以实时查看已完成区域
- 自动检测数据覆盖率和质量问题
3. 建筑施工监控
施工现场的进度和安全监控:
- 定时扫描施工现场变化
- 与BIM模型对比,发现偏差
- 生成进度报告和安全预警
技术挑战与解决方案
挑战1:数据一致性
问题:临时渲染与最终渲染的数据可能不一致
解决:建立数据版本控制机制,确保数据来源的一致性
挑战2:转换时间延迟
问题:PotreeConverter转换耗时,影响用户体验
解决:采用增量转换和预转换策略,最小化延迟
挑战3:内存占用过高
问题:同时维护两套渲染系统消耗大量内存
解决:精确控制对象生命周期,及时释放无用数据
系统部署与监控
部署架构
前端渲染层:运行在浏览器中的Potree + Three.js应用
数据处理层:Node.js服务负责数据接收和格式转换
存储层:高速SSD存储临时数据,NAS存储最终结果
监控指标
性能指标:FPS、内存使用率、渲染点数
业务指标:数据处理延迟、转换成功率、用户交互响应时间
系统指标:CPU使用率、磁盘IO、网络带宽
演示视频
完整增量渲染系统演示
以下视频展示了基于Potree的完整增量渲染系统工作流程:
视频展示内容:实时点云数据流入 → Three.js临时渲染 → LAS文件生成 → PotreeConverter转换 → Potree正式渲染 → 内存管理优化
纯Three.js增量渲染方案
作为对比,以下视频展示了不依赖Potree格式的纯Three.js增量式点云渲染方案:
演示内容:原始点云数据流 → BufferGeometry批量处理 → 分块内存管理 → LOD动态调整 → 实时性能监控
纯Three.js方案特点:
- 无格式转换:直接处理原始点云数据,省去LAS文件生成和PotreeConverter转换步骤
- 内存效率:使用BufferGeometry的TypedArray,内存占用更加可控
- 实时性更高:减少中间环节,数据到渲染的延迟更低
- 适用场景:中小规模点云(< 500万点)的实时应用
性能对比:
- 处理延迟:纯Three.js方案延迟降低60-80%
- 内存占用:相比Potree方案节省30-40%内存
- 渲染质量:在中近距离观察时质量相当,远景细节略有不足
未来发展方向
WebAssembly优化
将PotreeConverter编译为WebAssembly,在浏览器中直接运行转换过程,进一步减少延迟和服务器负载。
GPU加速处理
利用WebGL Compute Shader或WebGPU进行点云数据的并行处理,大幅提升处理速度。
边缘计算集成
结合边缘计算节点,在数据采集点附近进行预处理,减少数据传输量和处理延迟。
AI辅助优化
使用机器学习算法预测数据特征,自动调整渲染参数和处理策略。
总结
增量渲染系统代表了点云可视化技术的一个重要发展方向。通过巧妙的双重渲染策略和精心设计的数据流转机制,我们成功解决了大规模点云数据实时处理的技术难题。
这套系统不仅在技术上具有创新性,更重要的是它为实际应用提供了可行的解决方案。无论是测绘行业的实时监控,还是建筑业的施工管理,都能从这项技术中获得实质性的价值提升。
随着WebAssembly、WebGPU等新技术的成熟,相信点云实时处理的性能还将得到进一步提升,为更多创新应用场景奠定技术基础。